Suiza: crean la primera pierna robótica con "músculos artificiales"
Robert Katzschmann desarrolla músculos artificiales. Foto: Rigger House Instagram.
Un equipo de investigadores suizos ha anunciado el desarrollo de la primera pierna robótica equipada con "músculos artificiales", una innovadora tecnología basada en bolsas rellenas de aceite que permite al robot realizar saltos en distintas superficies.
Este avance fue presentado el lunes a través de un estudio publicado en la revista Nature Communications, el cual incluye un video demostrativo que muestra a la pierna robótica en acción sobre pasto, arena y piedras.
[Lee también: ¿Por qué las empresas están abandonando los servicios de la Nube?]
El equipo liderado por Robert Katzschmann, coautor del estudio y profesor de robótica en la Escuela Politécnica Federal de Zúrich, ha desarrollado una pierna robótica que imita el movimiento fluido y adaptable del cuerpo humano.
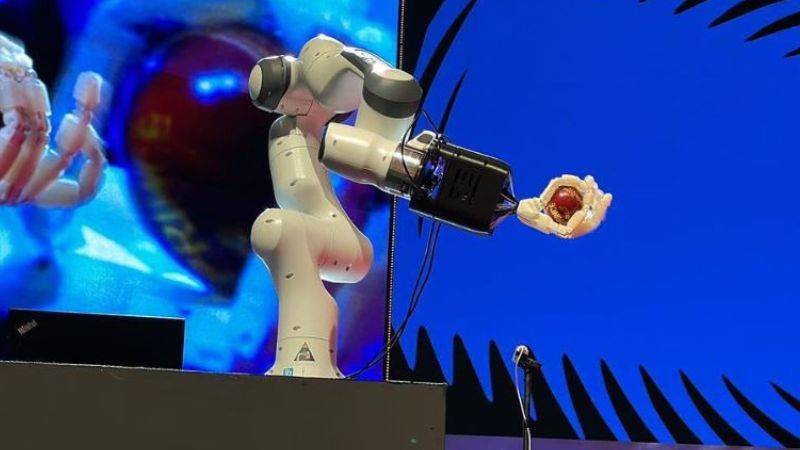
La tecnología de "músculos artificiales", también conocida como actuadores electrohidráulicos, se asemeja a pequeñas bolsas de congelación unidas a los huesos metálicos de la pierna robótica. Estas estructuras, equipadas con electrodos y rellenas de aceite, se contraen y relajan para simular el funcionamiento de un músculo natural.
En contraste con los robots humanoides convencionales, que suelen utilizar motores y articulaciones metálicas rígidas, la nueva pierna robótica se beneficia de una mayor agilidad y menor consumo energético.
Katzschmann explicó que los robots industriales tradicionales son pesados y costosos, lo que limita su uso en aplicaciones domésticas. La nueva tecnología tiene el potencial de crear robots que puedan transportar cargas y realizar tareas más delicadas, como dar un abrazo o estrechar la mano.
La pierna robótica desarrollada por el equipo suizo es capaz de saltar hasta 13 centímetros, aproximadamente el 40% de su altura, aunque por el momento esta hazaña se limita a realizarse en un círculo debido a que la pierna está conectada a un eje alrededor del cual gira.
La capacidad para moverse con agilidad en terrenos difíciles representa una ventaja significativa sobre los robots tradicionales, que enfrentan limitaciones en terrenos irregulares.
A pesar de los avances, Katzschmann subrayó que todavía no es posible construir un robot humanoide completamente impulsado por músculos artificiales. Sin embargo, el bajo costo de los componentes necesarios para los músculos artificiales podría facilitar la producción en serie y acelerar futuros desarrollos en este campo.
Los investigadores esperan que su técnica mejore la eficiencia de los robots en entornos diversos. Además, se busca que promueva la creación de robots humanoides más versátiles y accesibles para tareas domésticas.
Este desarrollo marca un paso importante hacia la creación de robots más adaptables y eficientes con aplicaciones que podrían transformar el ámbito de la robótica doméstica en los próximos años.
Con información y fotos de AFP.
TAMBIÉN TE PUEDE INTERESAR: